以下为个人学习笔记整理,涉及坐标内容统一用右手坐标系,课程官网。
# Cameras,Lenses and Light Fields
# Camera
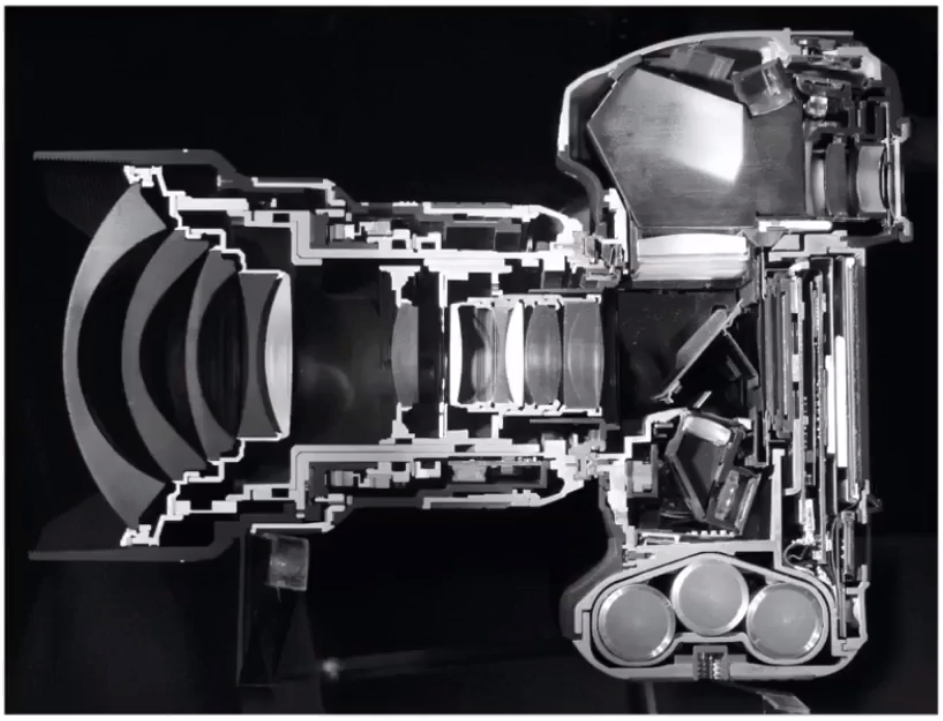
# Pinholes & Lenses Form Image on Sensor
针孔成像。
# Shutter Exposes Sensor For Precise Duration
快门:控制光线进入相机的时间。

# Sensor Accumulates Irradiance During Exposure
传感器:用于接受经过快门传递进相机的光线照度(Irradiance)。
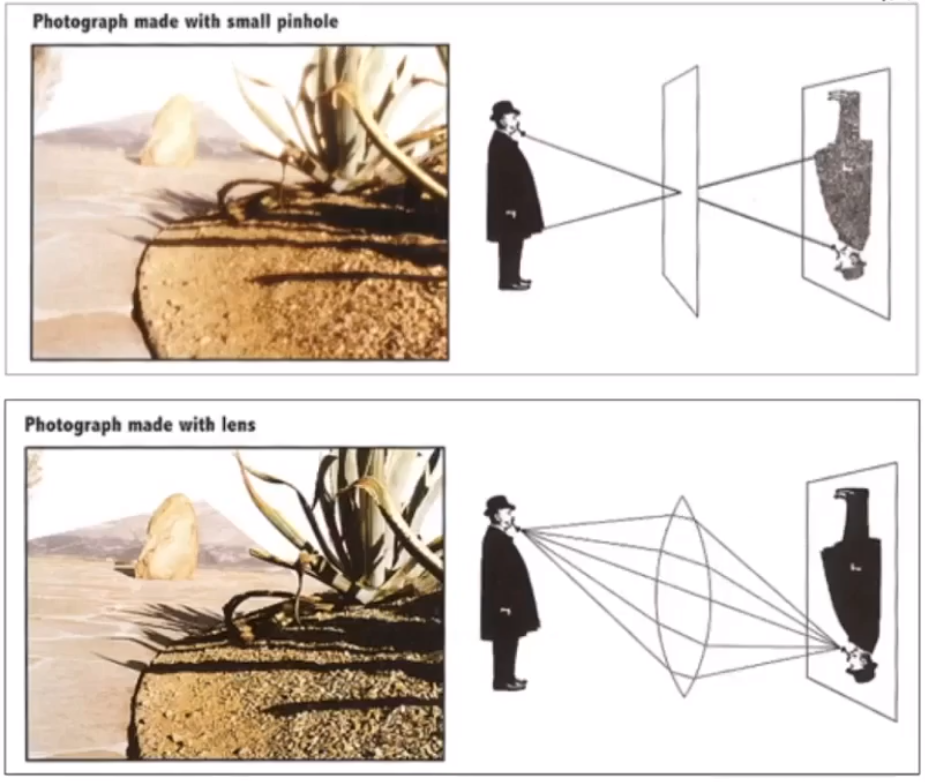
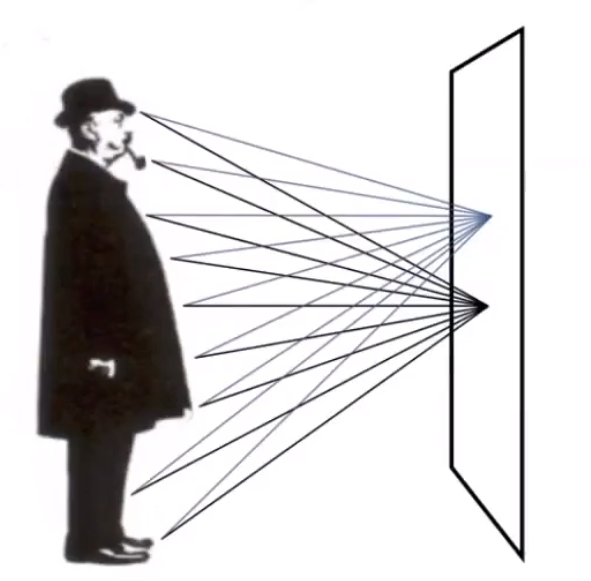
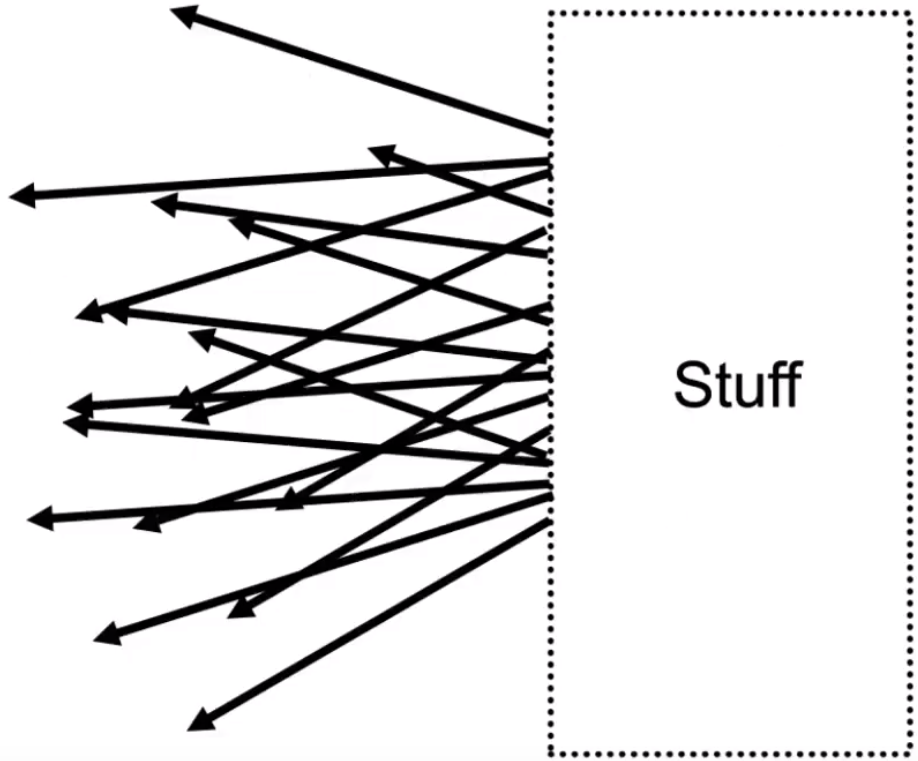
# Why Not Sensors Without Lenses
如果没有透镜,传感器上每个点接收到的照度,可能来自任何的方向。这样会使得最终的成像非常的模糊。
# Field of View(FOV)
# Effect of Focal Length on FOV
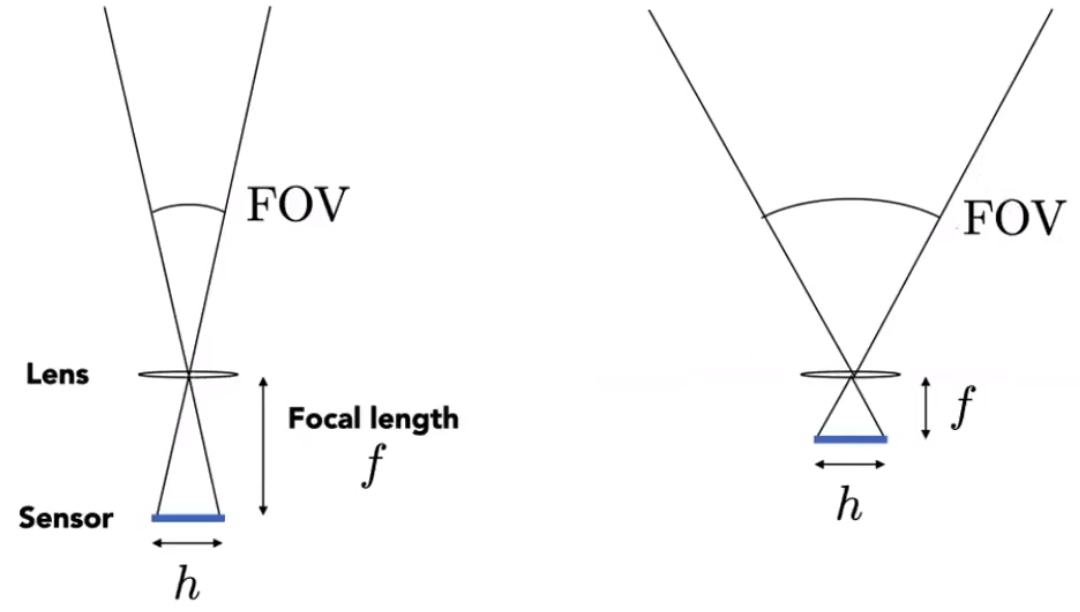
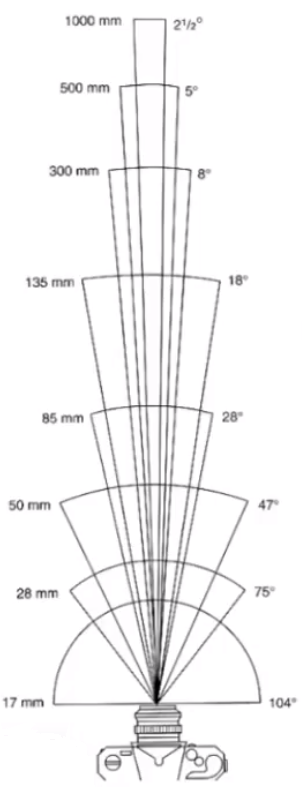
# Focal Length vs Field of View
由于视场与传感器大小和焦糊都存在关系,为了方便。传感器大小统一按照 35mm(36x24mm) 的格式。
- 17mm 焦距的广角镜头 。
- 50mm 焦距的正常镜头 。
- 200mm 焦距的长焦镜头 。
手机上定义的焦距实际上是按照 35mm 传感器换算得到的焦距,实际上手机的传感器并非 35mm 的格式。

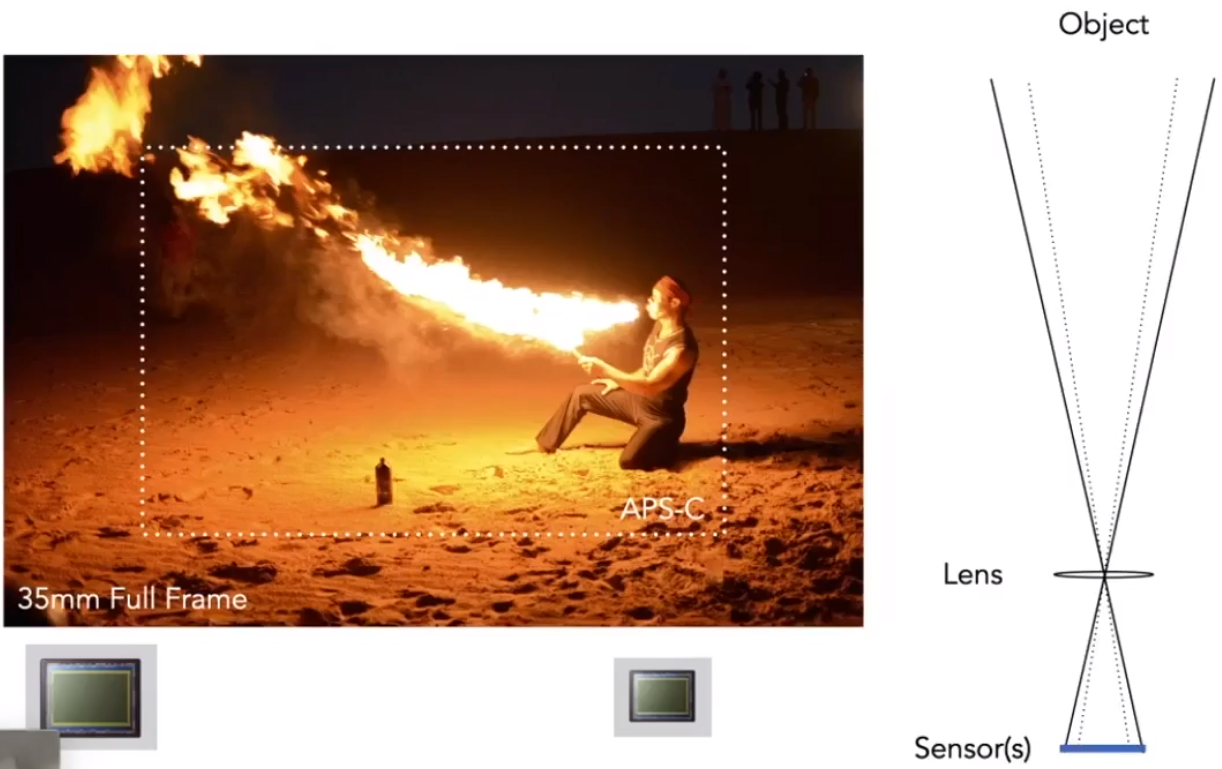
# Effect of Sensor Size on FOV
传感器越大对应的视野也就越大。
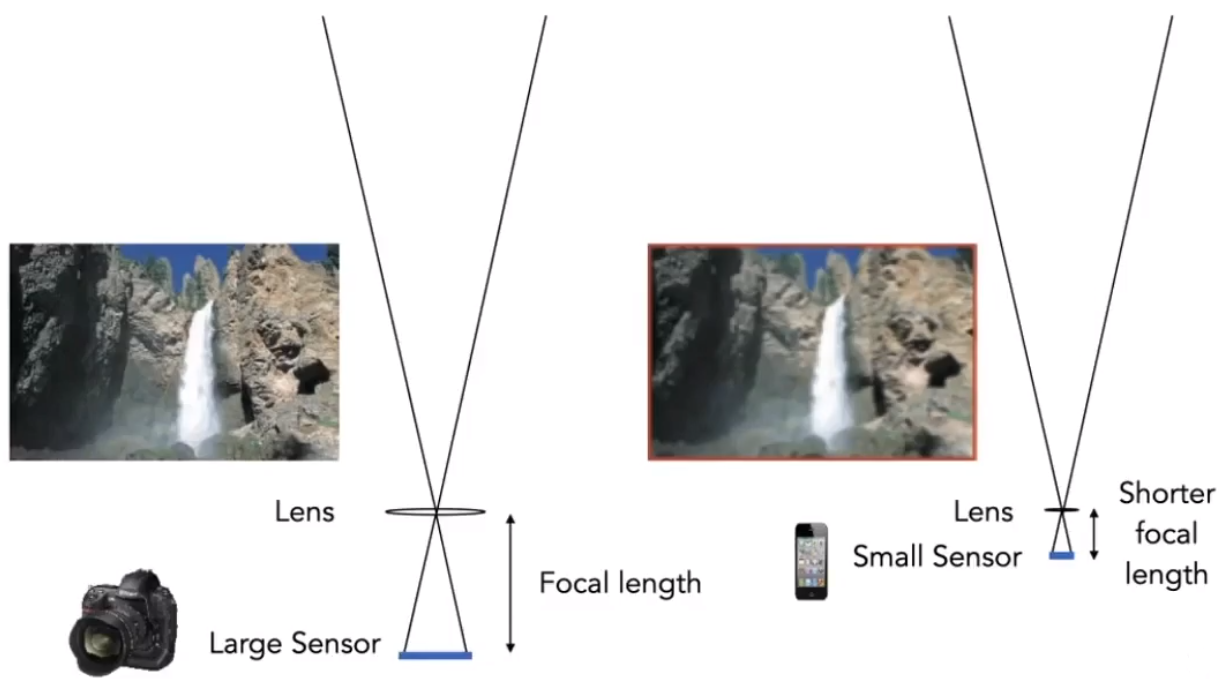
# Maintain FOV on Smaller Sensor
# Exposure
- 。
- Exposure = time x irradiance
- Exposure time(T)
- Controlled by shutter。
- Irradiance(E)
- Power of light falling on a unit area of sensor。
- Controlled by lens aperture and focal length。
# Exposure Controls in Photography
# 光圈大小(Aperture size)
控制光线进入的量,从而影响曝光。
# F-Number(F-Stop):Exposure Levels
写作 :其中 N 表示:

# 快门开放时间(Shutter speed)
控制光线进入的时间,从而影响曝光
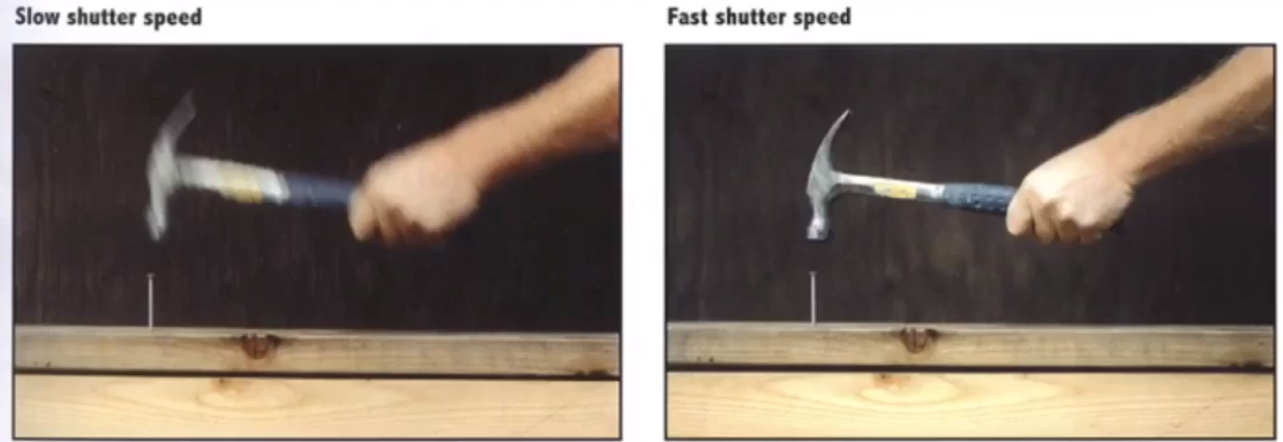
# Side Effect of Shutter Speed
- 运动模糊:快门速度越慢,光线进入时间越长,导致捕捉到了部分运动轨迹,而使得图片模糊。

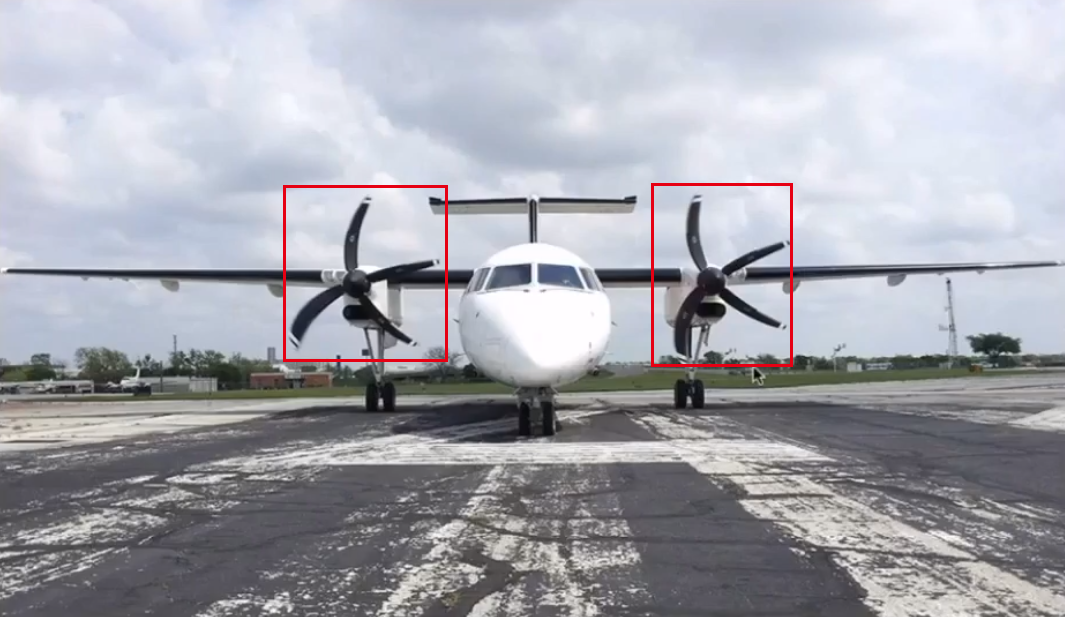
# Rolling shutter:由于快门打开是一个过程,并非瞬间完成,所以会导致某些高速运动的物体发生扭曲。
不同位置的图像记录的并非同一时间的光照。
# 感光度(ISO gain)
类似后期处理的东西,用于对最终的曝光值做一个放大或者缩小的操作。
# Exposure:Aperture、Shutter、Gain(ISO)
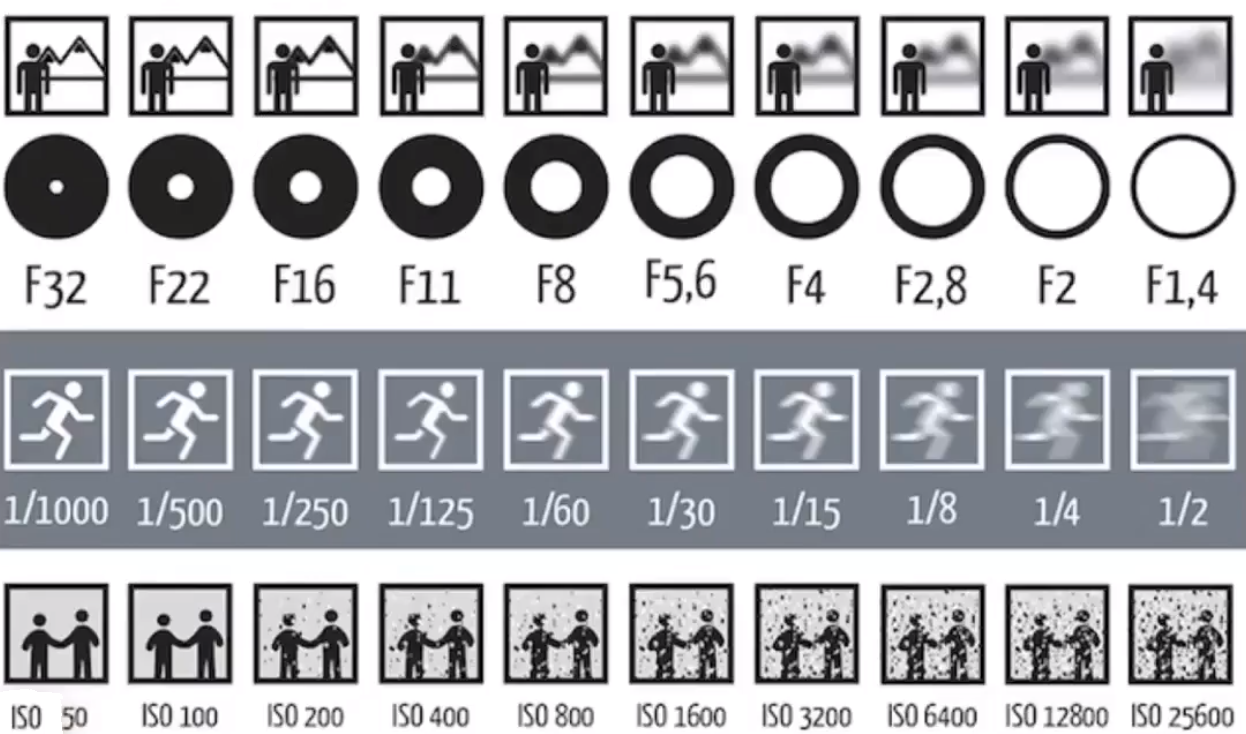
# Constant Exposure:F-Stop vs Shutter Speed
如下的 F-stop 和 Shutter speed 可以得到一致的曝光。

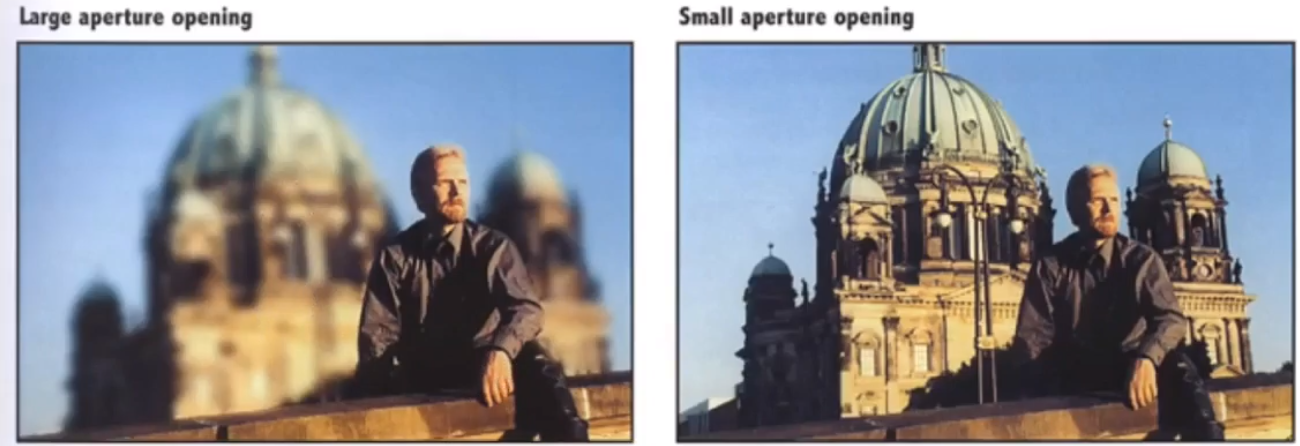
但是大光圈会导致 「景深」(Depth of field),过长的曝光时间也会导致 「运动模糊(Motion blur)」,需要进行权衡。
# High-Speed Photography
高速摄影 :正常的曝光 = 极快的快门速度 x (大光圈 or 高感光度)

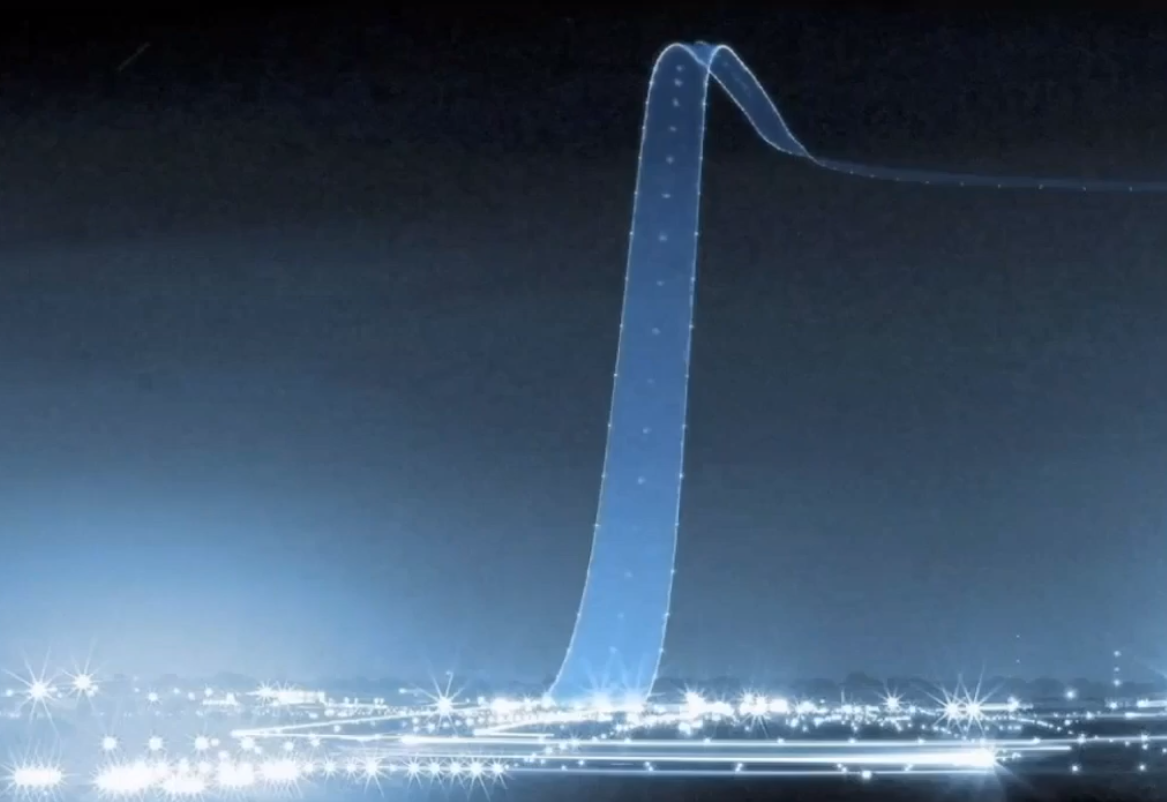
# Long-Exposure Photography
延迟摄影:正常的曝光 = 极慢的快门速度 x (小光圈 or 低感光度)
# Thin Lens Approximation
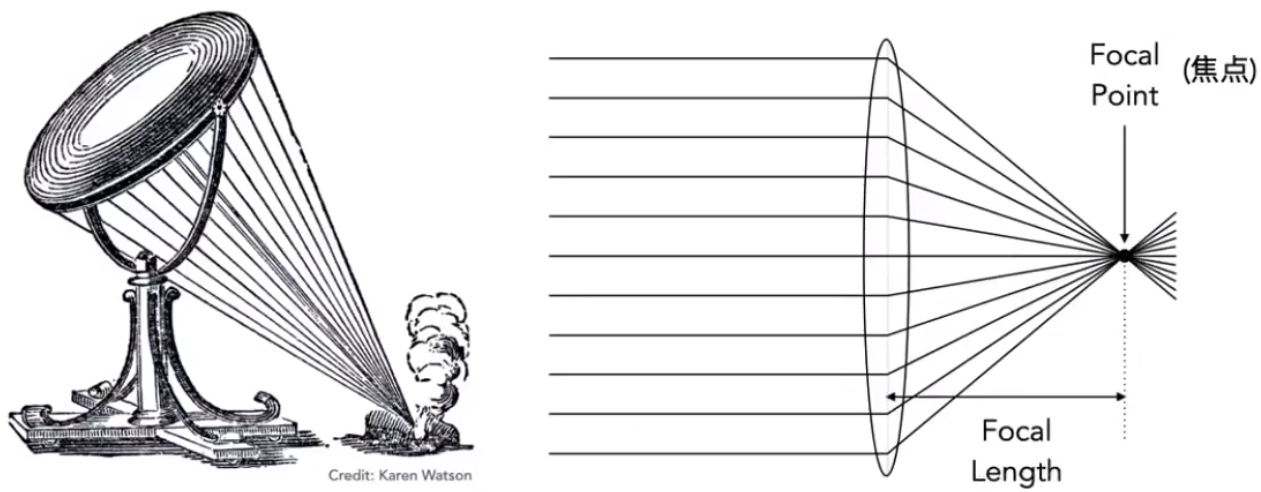
# Ideal Thin Lens —— Focal Point
- 平行光会被透镜汇集到一点。
- 焦点的点光源通过透镜会变成平行光。
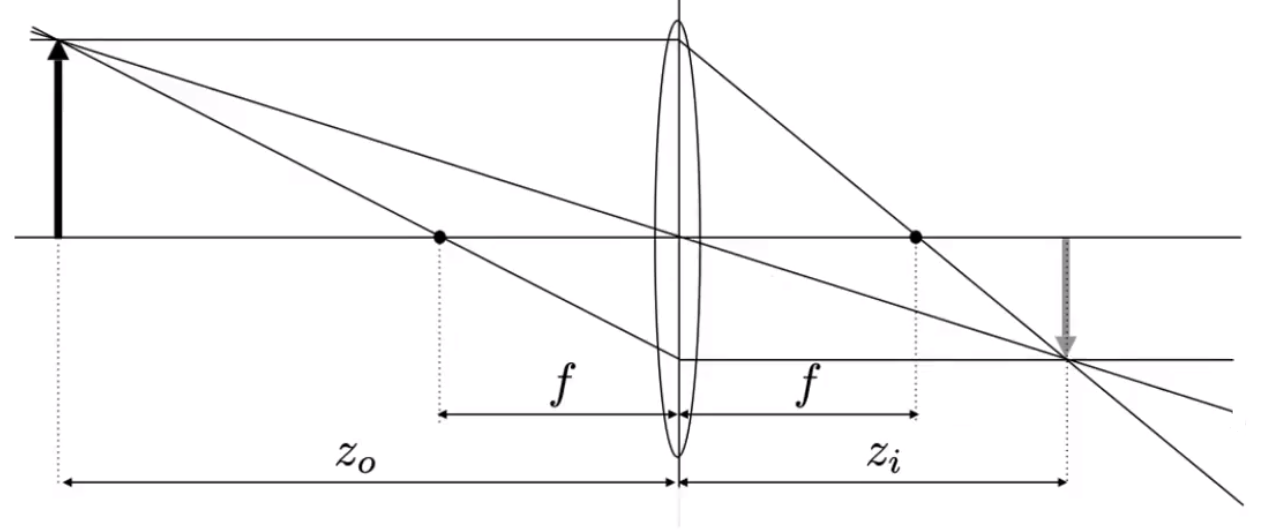
# The Thin Lens Equation
- 物距():物体距离透镜中心的距离
- 像距():所成像距离透镜中心的距离
- 焦距():平行光经过透镜后汇聚到的点距离透镜的距离。
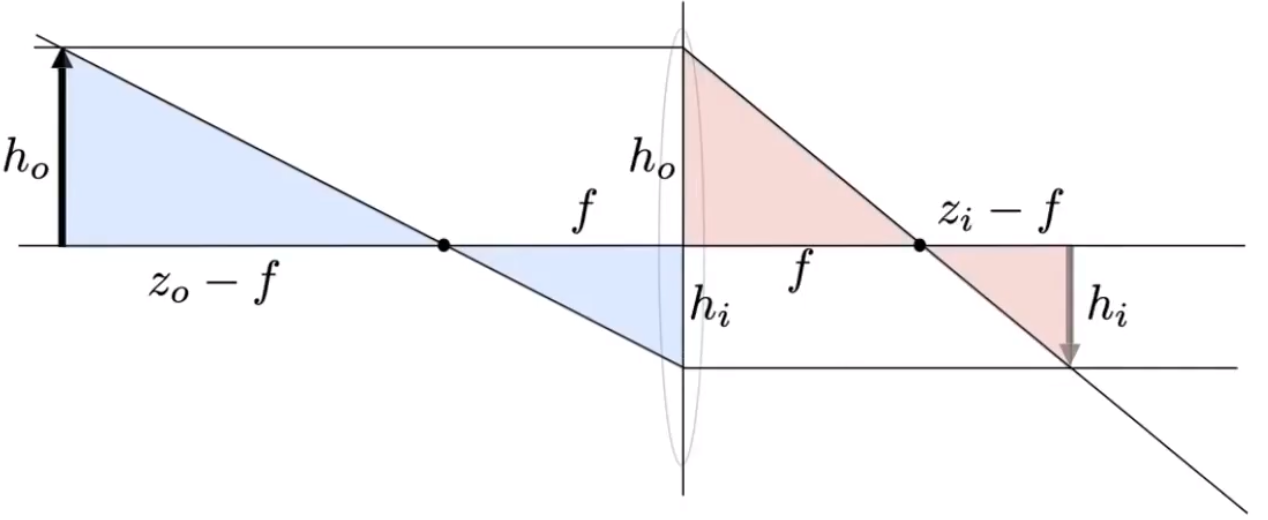
# 透镜方程推导
# Defocus Blur
# Computing Circle of Confusion(CoC)Size
- Focal Plane:物体本身的位置,该位置会被完美的投影到图片上。
- Image:通过透镜投影物体所成的最锐利的像。
- Object:远离「Focal Plane」的物体
- Sensor Plane:传感器成像平面,最终投影的图像会被映射到上面。
对于 Object 的物体,最终会被强行「放大」到「Sensor Plane」上,导致物体出现模糊的效果。
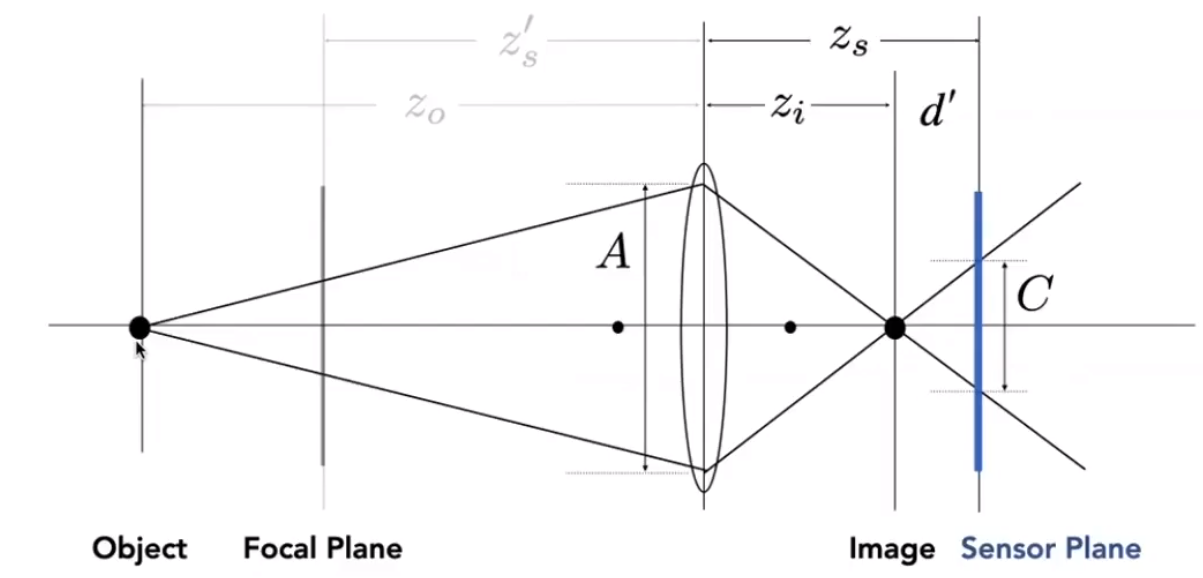
物体本身的模糊程度实际上和类型的直径 有关。
光圈越大,所成的像也就越模糊。

# Renderings with Lens Focus
通过透镜的方式渲染图片,可以得到各种的效果:

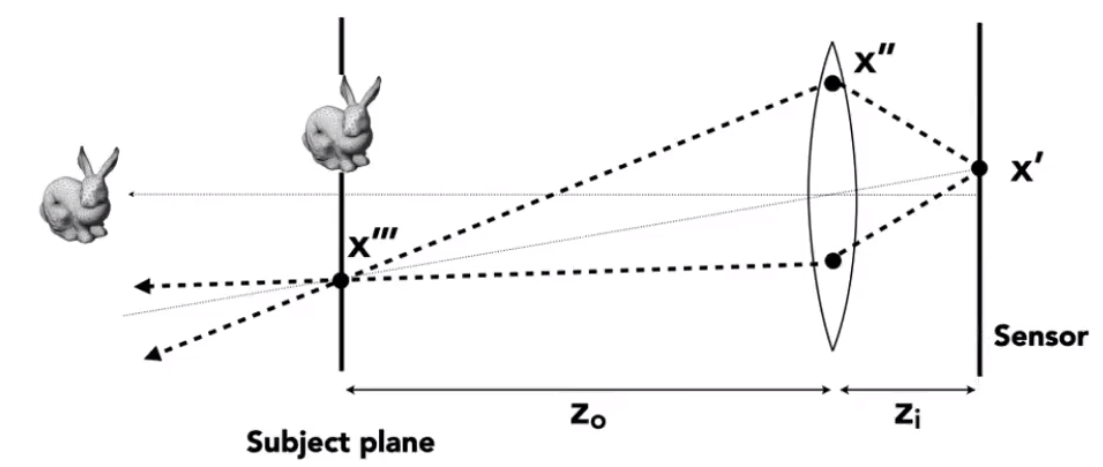
# Ray Tracing for Defocus Blur(Thin Lens)
定义一些列的和透镜成像有关的数值。
- 透镜的焦距
- 透镜的直径
- 传感器大小
- 物体距离透镜的水平距离 。
就可以计算出最终所成的像的像距是 。
假设传感器上存在一个点 。
连接 和透镜的中心,会得到一个物体上的点 。
任取透镜上的一个点 ,可知,该点也必定会穿过 。
# Depth of Field(FYI)
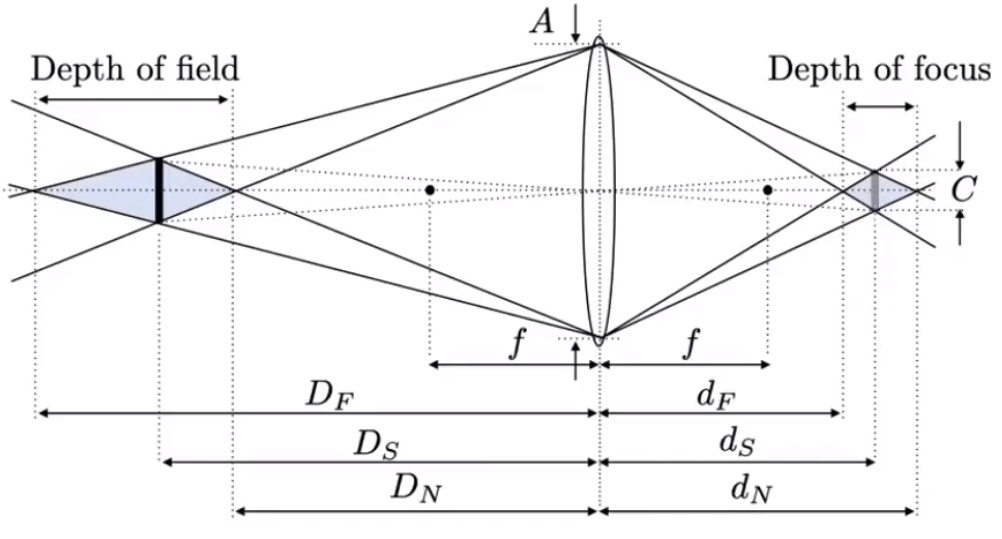
# Circle of Confusion for Depth of Field
定义了在焦点附近一段距离范围内的「CoC」,该范围内的「CoC」对于物体的成像没有较大的影响。
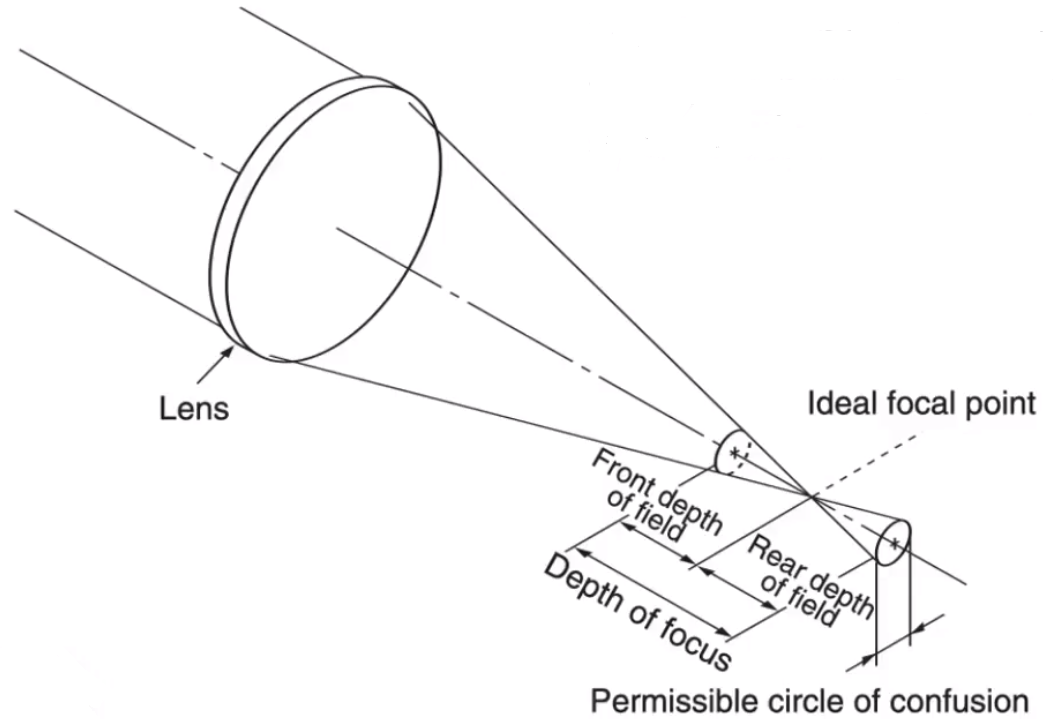
而对于物距最终投影成像,并且在该「CoC」范围内的物距范围,则称之为景深(Depth of Field)。
# Light Fields / Lumigraph
# 全光函数(Plenoptic Function)
用于描述人眼能够看到的所有内容的集合。
# Grayscale snapshot
假设人眼位置固定,可以看向任何的方向,方向用 来表示。
那么往任意方向能够看到的值记作 。
# Color snapshot
如果能够知道每个方向的光线的波长 。那么,就可以得到各种各样的颜色 。
# A movie
给观察的内容增加一个时间维度 ,那它就可以描述一部电影 。
# Holographic movie
如果观察点本身也可以运动,那么就可以描述一部全息电影 。
# Ray
光线的定义,一个三维坐标 + 一个水平方向 + 一个垂直方向:
# Ray Reuse
另一种定义方式,通过定义两个个二维的点 。
「二维的点」其实是「三维物体」表面的展开。类似模型的 贴图。
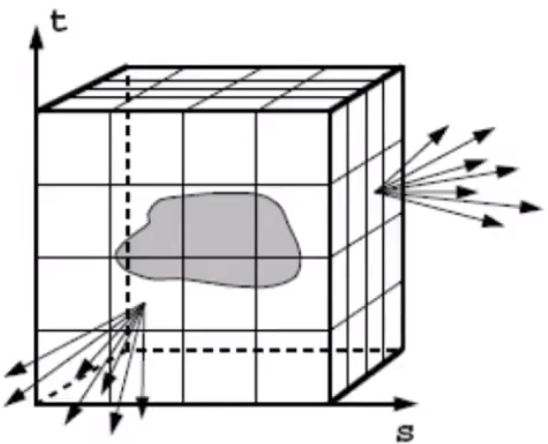
# Only need plenoptic surface
描述物体在其包围盒上各个点对应的任意方向上的发光情况,就能反过来定义一个物体在各个位置被观察到的情况。
# Light Fields
用于描述在任何位置,去往到任何方向的光照强度。
# Synthesizing novel views
由此,观察点在任意位置,都能通过记录在物体表面各个方向上的光照强度,从而得到观察内容。
# Lumigraph / Lightfield
其实并不需要记录物体上每个点的各个方向的光线,我们只需要记录该物体的包围盒表面上各个位置的各个方向的光照。
只要观察点不在包围盒内。
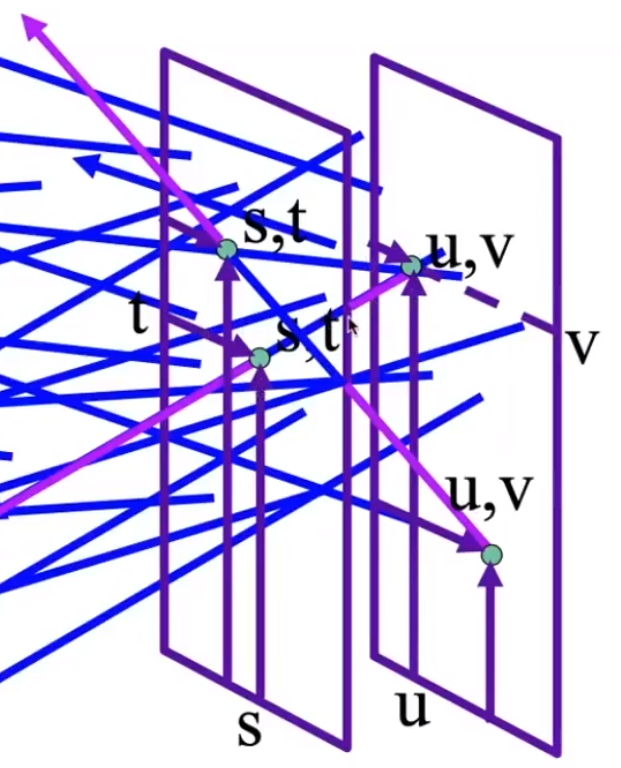
# Lumigraph —— Organization
设想以下,如果包围盒上一个点和外围与包围盒平面平行的平面上某点的连线,其实就可以确定一条光线。
因此,可以通过两个相互平行平面上的两个点,来确定一条光线的起点和方向。
- 第一个点在物体的包围盒 贴图上。
- 第二个点在平行于物体包围盒的平面上 上 。
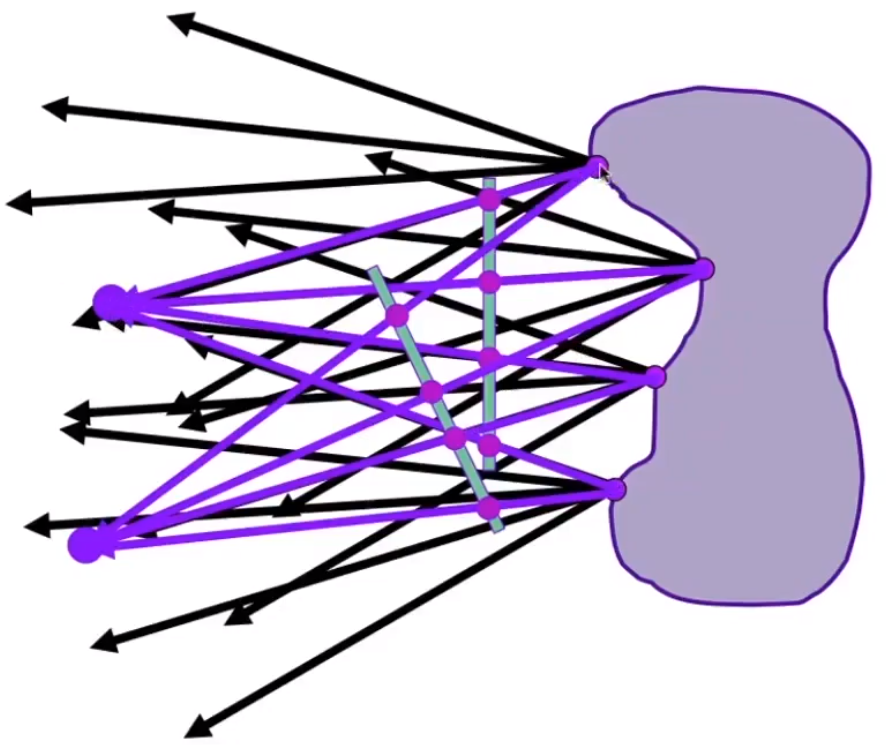
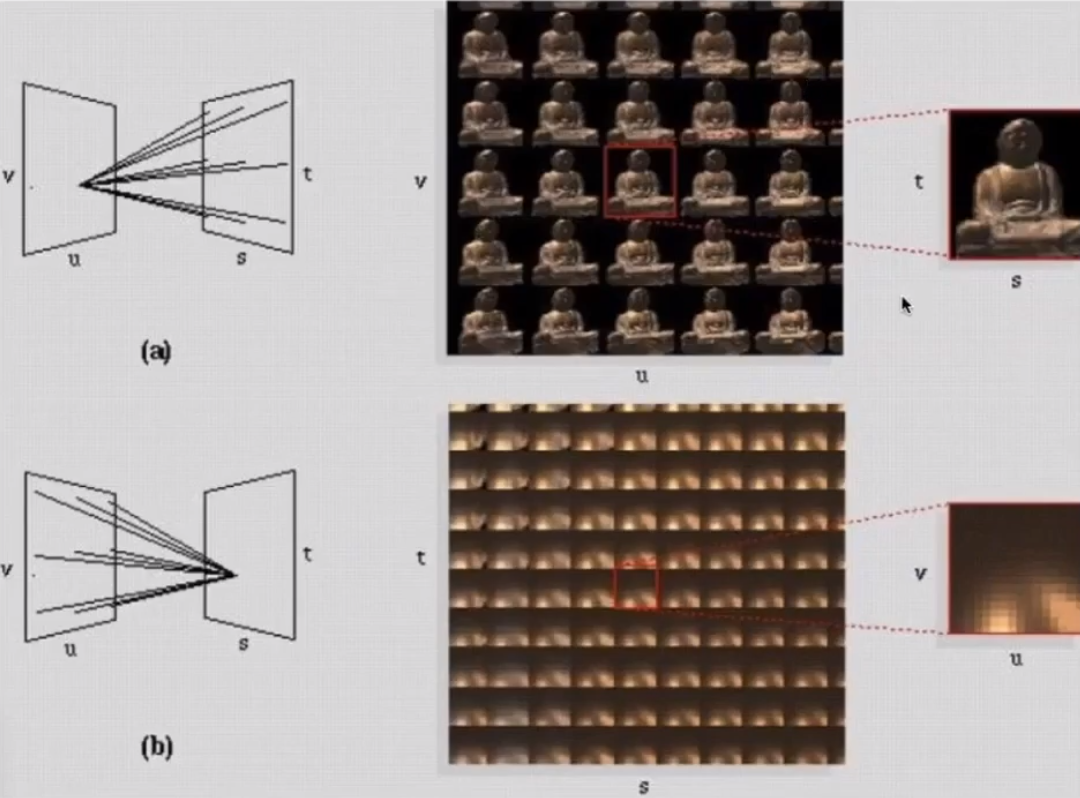
换一个方式理解:
- 第一种观察可以看作是:一个观察点在不同的方向,看向观察物体的同一个点得到的一组图像。
- 第二种观察可以看作是:物体的某个细节,在「物体不同位置」的「某个方向上」的光线强度。
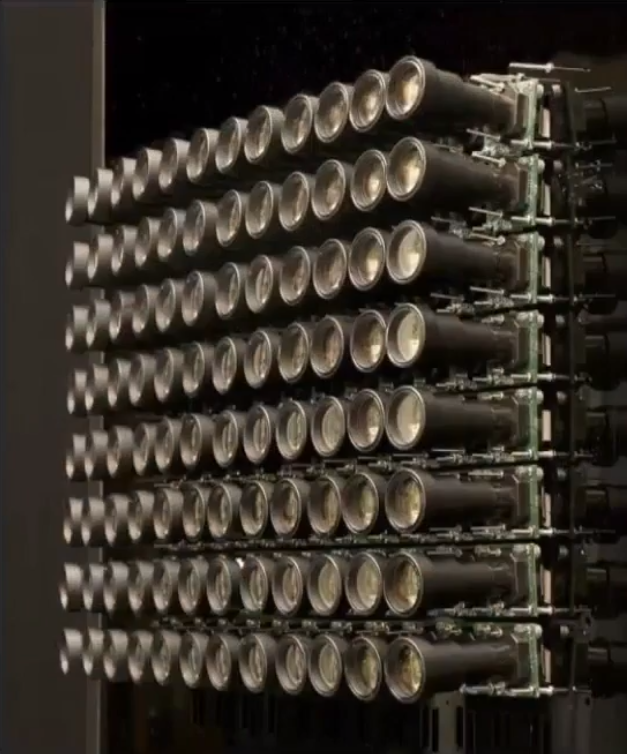
# Stanford camera array
第一种的效果就类似多个不同方位的摄像机对物体进行拍摄,最终得到多张不同角度的物体图像。
# Integral Imaging
本质上就是把单位接受到的「Irradiance」转化成各个不同方向的「Radiance」。
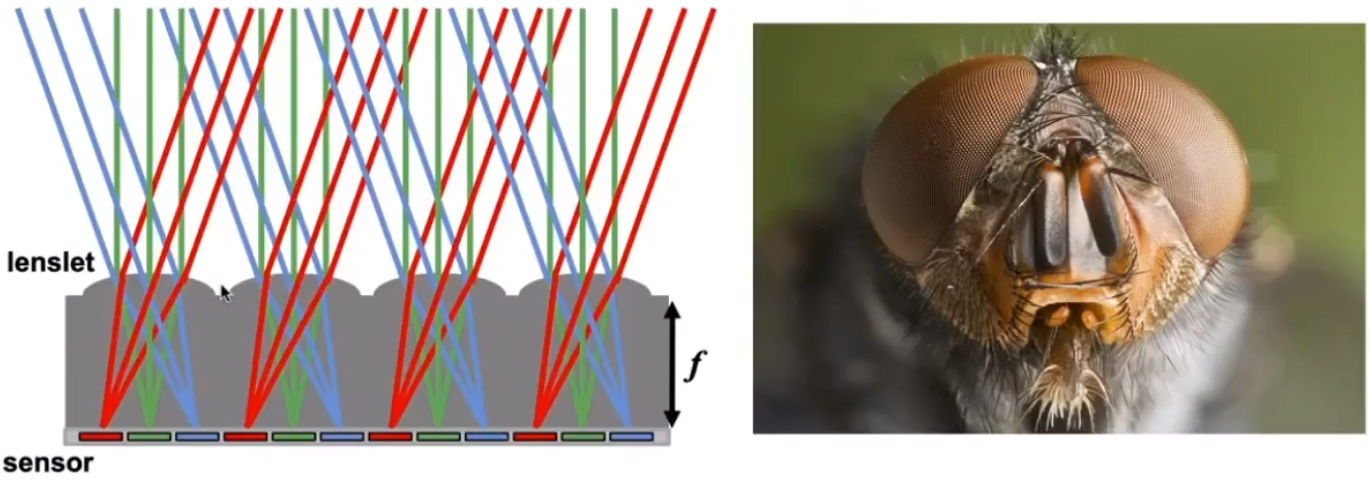
# Light Field Camera
# The Lytro Light Field Camera
先拍照,再来对拍照结果调整聚焦。

光场照相机和普通相机的区别在于:
- 光场照相机把普通相机的传感器上每个像素点都替换成了一个透镜。并把传感器向后挪了一点。
- 一个像素原本记录的「Irradiance」,根据不同的角度被拆分成了多个。

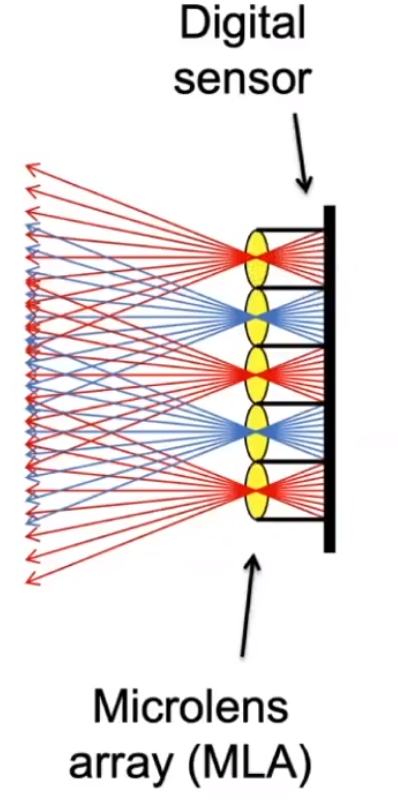
# 如何得到普通的照片❓
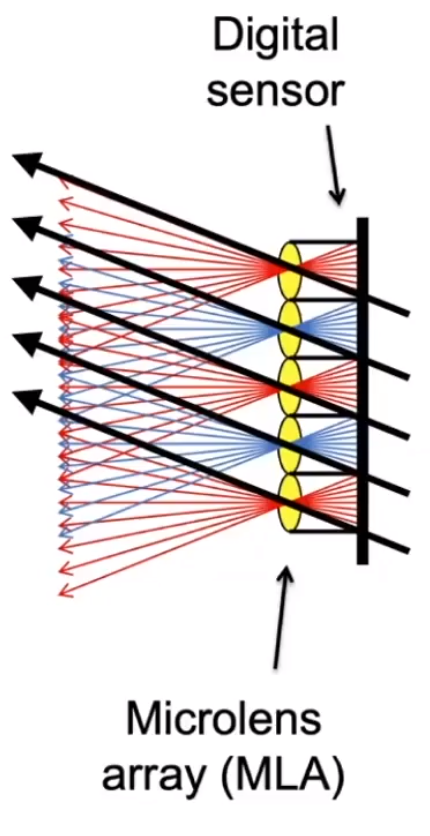
由于每个透镜内都记录了各个方向上的光线。所以可以在成像的时候,筛选出不同方向的光线从而实现调整拍摄角度的效果。
变化焦距的功能也是类似的,由于记录了某个焦距下的光场,所以再表换焦距后,可以以相应的计算变换后的光场,从而得到变焦后的成像。
# 光场照相机的缺点:
- 由于之前的每个像素点记录的是该点各个方向「Irradiance」的平均值。现在变成记录整个点的各个方向「Irradiance」。假设相同大小的传感器,光场照相机所表示的像素将会更小。
- 把像素替换成一个个透镜本身也是一项高成本的工作。
- 要有透镜数量和透镜大小的权衡。