以下为个人学习笔记整理。参考 PhysX SDK 3.4.0 文档
# PxTransform
用于描述 PhysX 系统下 Transform 操作的类,其提供了两个数据:
- PxQuat q:用于描述旋转的四元数 q
- PxVec3 p:用于描述平移的向量 p
# PxVec3
一个三维向量,用于表示一个物体从 A 点移动到 B 点所需的方向和距离
# PxQuat
四元数,用于描述三维空间下角度变化的数据结构,说到四元素,这里就不得不提到「旋转矩阵」和「欧拉角」,三者均用于表示空间层面的旋转。
- 四元数:由四个数字组成
- 旋转矩阵:由 3X3 的矩阵表示
- 欧拉角:由三个数字组成
在对四元数进行展开之前,先简单来聊聊「旋转矩阵」和「欧拉角」:
「旋转矩阵」在旋转方面的应用可以参考 Transform 文章,其中的一些证明就不再赘述,旋转矩阵的缺点就是需要用 9 个数表示,并且旋转计算效率较低,而且会产生矩阵蠕变(由于浮点数精度丢失导致的误差累积),在多次变换后使得矩阵本身不合法(非正交),需要通过正交化进行修正,但正交化性能消耗较高。不过「旋转矩阵」理解上相对较为简单,且 GPU 被设计成更适合进行矩阵运算,因此也被广泛应用在图形渲染领域。
「欧拉角」则通过 链式旋转 的方式,来实现到指定方向的旋转。这种旋转必须明确定义旋转的先后关系。例如 z>x>y。链式旋转一次操作等同于进行了三次不同坐标轴的旋转,理解上较为直观,但也引入了一个严重的问题:万向节死锁。其本质是由于链式旋转过程中基坐标变化,导致其中两个旋转轴发生重叠,丢失了其中一个维度的旋转能力。常见的解决办法:例如 Unity 下的摄像机通常通过限制旋转轴范围的方式来避免该问题。
接下来我们再来聊聊「四元数」:
「四元数」四元数的意义其实更在于数学层面,其思想来源于 罗德里格斯旋转公式 (Rodrigues’ Rotation Formula),为了后续理解,简单介绍一下该旋转公式:
假定要把一个三维向量 ,围绕一个旋转轴 ,旋转 角度。那么势必就可以把向量 投影到轴 及垂直于轴的平面上。
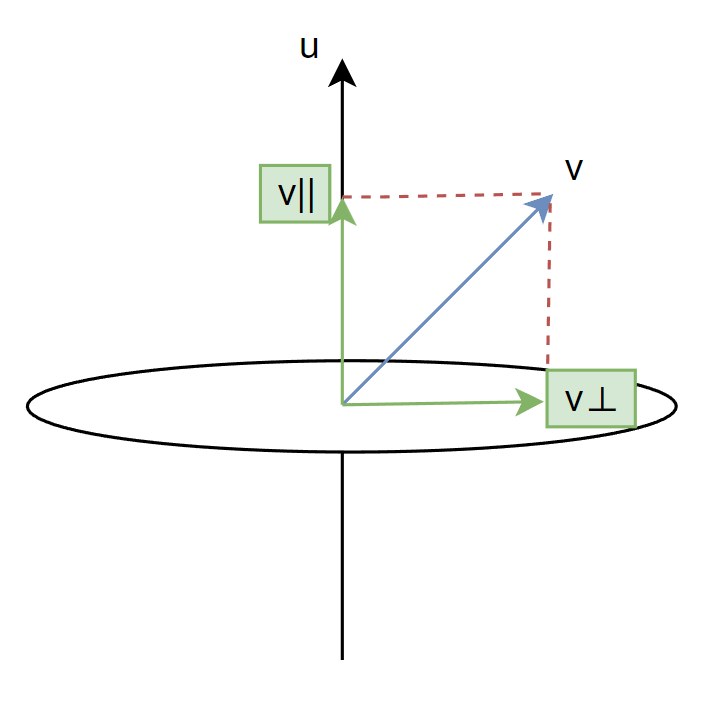
因此整个旋转也可以视为对 和 绕 轴进行旋转。然后根据三角函数和一些几何运算,就可以推导出一个普适的三维旋转公式:
\begin{align} v\prime &= v\prime\parallel + v\prime\perp \\ &= v \parallel + cos(θ)v\perp + sin(θ)(u × v\perp) \\ &= cos(θ)v + (1 − cos(θ))(u · v)u + sin(θ)(u × v) \end{align}介绍完旋转公式,接下来再来看看四元数的定义,四元数本身由三个虚部 + 一个实部组成:
这里再引入一个四元数的计算「Graßmann 积」,假定对两个四元数进行求积:
\begin{align} q_1q_2 &=(a+bi+cj+dk)(e+fi+gj+hk) \\ &=𝑎𝑒 + 𝑎𝑓𝑖 + 𝑎𝑔𝑗 + 𝑎ℎ𝑘 + \\ &\quad𝑏𝑒𝑖 + 𝑏𝑓𝑖^2 + 𝑏𝑔𝑖𝑗 + 𝑏ℎ𝑖𝑘 + \\ &\quad𝑐𝑒𝑗 + 𝑐𝑓𝑗𝑖 + 𝑐𝑔𝑗^2 + 𝑐ℎ𝑗𝑘 + \\ &\quad𝑑𝑒𝑘 + 𝑑𝑓𝑘𝑖 + 𝑑𝑔𝑘𝑗 + 𝑑ℎ𝑘^2 \end{align}这里再对照虚部的计算规则 ,对 进行化简:
\begin{align} q_1q_2 &= (ae - bf - cg - dh) + &&\\ & \quad(be + af - dg + ch)i + &&\\ & \quad(ce + df + ag - bh)j + &&\\ & \quad(de - cf + bg + ah)k &&\\ \\ \text{矩阵形式表示:} & q_1q_2 = \begin{bmatrix} a & -b & -c & -d \\ b & a & -d & c \\ c & d & a & -b \\ d & -c & b & a \end{bmatrix} \begin{bmatrix} e \\ f \\ g \\ h \\ \end{bmatrix} \end{align}假设 ,就可以推导出「Graßmann 积」的如下性质:
再把上面推导出的「罗德里格斯旋转公式」进行套用:
\begin{align} 𝑣\prime &= 𝑣\prime\parallel+ 𝑣\prime\perp \\ &=𝑣 \parallel+ cos(θ)v\perp + sin(θ)(u × v\perp) \\ &=𝑣\parallel+ q𝑣\perp &&\text{其中: }𝑞 = [cos(θ), sin(θ)u] \\ &=𝑝𝑝^{−1}𝑣\parallel + 𝑝𝑝𝑣\perp &&\text{令: }p^2 = q, \quad p = [cos(\frac{θ}{2}), sin(\frac{θ}{2})u] \\ &=𝑝𝑣\parallel 𝑝^∗ + 𝑝𝑣\perp 𝑝^* &&\text{[引理1]单位四元数p满足:} p^{-1} = p^* \\ & &&\text{[引理2]v是纯四元数时满足:} p𝑣=vp \\ & &&\text{[引理3]如果p又正交于v满足:} p𝑣\perp = 𝑣\perp p^* \\ &=𝑝𝑣𝑝^∗ \text{其中:} p = [cos(\frac{θ}{2}), sin(\frac{θ}{2})u] \end{align}到此,四元数旋转就推导完成了。除此以外,四元数还具备两个特殊的性质:「旋转叠加」和「旋转插值」。
# 旋转叠加
本质上就是对两次旋转进行合并,得到一个新的旋转结果,例如进行一个 旋转后再进行 旋转,四元数的表示:
上述公式可以进一步化简:,因此只需要计算一次 的结果即可,四元数乘法上面也已经介绍
# 旋转插值
假设旋转 p 是围绕某个轴旋转 1°,那根据「旋转叠加」,旋转 360° 可以写作 。这里再根据上面的指数公式:
进行一般化和幂运算的求证(不在此证明),可以得到一个指数和 θ 角的关系:
回过头来再看看的旋转,如果需要在 0~360° 之间进行插值,实际上就对于 p 中的 θ,在 0~360 进行插值。
把该规则一般化,变成可以在任意两个旋转 内做插值,并且插值范围统一在 [0~1] 区间。
这里假设从 旋转到 的旋转为 那么就需要一个有关 的公式,在 的时候是 ,在 的时候是 :
计算求得插值的一般形式
# PxQuat 相关接口说明
前面简要介绍了有关四元数的计算过程,这里针对以上内容,结合实际代码来探讨一下 PhysX 内有关四元数的实现:
# 四元数的构造
根据之前的定义,四元数可以用来描述围绕某个单位轴旋转 θ 角旋转的操作 p:
对应到代码上来说 w 表示实部,x、y、z 表示 i、j、k:
PX_CUDA_CALLABLE PX_INLINE PxQuat(float angleRadians, const PxVec3& unitAxis) | |
{ | |
PX_ASSERT(PxAbs(1.0f - unitAxis.magnitude()) < 1e-3f); | |
const float a = angleRadians * 0.5f; | |
const float s = PxSin(a); | |
w = PxCos(a); // cos(θ/2) | |
x = unitAxis.x * s; // sin{θ/2)i | |
y = unitAxis.y * s; // sin(θ/2)j | |
z = unitAxis.z * s; // sin(θ/2)k | |
} |
# 四元数的加减法
这个比较简单,就是对应的实部和实部相加减,虚部和虚部相加减:
PX_CUDA_CALLABLE PX_FORCE_INLINE PxQuat& operator+=(const PxQuat& q) | |
{ | |
x += q.x; | |
y += q.y; | |
z += q.z; | |
w += q.w; | |
return *this; | |
} | |
PX_CUDA_CALLABLE PX_FORCE_INLINE PxQuat& operator-=(const PxQuat& q) | |
{ | |
x -= q.x; | |
y -= q.y; | |
z -= q.z; | |
w -= q.w; | |
return *this; | |
} |
# 四元数的乘法
这个之前也介绍过了:
\begin{align} q_1q_2 &= (w_1w_2 - x_1x_2 - y_1y_2 - z_1z_2) + \\ & \quad(x_1w_2 + w_1x_2 - z_1y_2 + y_1z_2)i + \\ & \quad(y_1w_2 + z_1x_2 + w_1y_2 - x_1z_2)j + \\ & \quad(z_1w_2 - y_1x_2 + x_1y_2 + w_1z_2)k \end{align}PX_CUDA_CALLABLE PX_INLINE PxQuat operator*(const PxQuat& q) const | |
{ | |
return PxQuat(w * q.x + q.w * x + y * q.z - q.y * z, // w1x2 + w2x1 + y1z2 - z1y2 | |
w * q.y + q.w * y + z * q.x - q.z * x, // w1y2 + y1w2 + z1x2 - z2x1 | |
w * q.z + q.w * z + x * q.y - q.x * y, // w1z2 + w2z1 + x1y2 - x2y1 | |
w * q.w - x * q.x - y * q.y - z * q.z); // w1w2 - x1x2 -y1y2 - z1z2 | |
} |
# 四元数的点乘
四元数的点乘意义在于假设四元数是四维空间中的向量,点乘用于求解两个四维向量夹角,计算方式其实和三维向量类似:
PX_CUDA_CALLABLE PX_FORCE_INLINE float dot(const PxQuat& v) const | |
{ | |
return x * v.x + y * v.y + z * v.z + w * v.w; | |
} |
# 四元数的旋转
四元数的旋转和逆旋转表示相对抽象一些,但核心思想都是通过将四元数转成旋转矩阵,在进行矩阵变化,这里再计算上面用工程思想做了一定的简化操作。
这里简单对四元数进行矩阵展开,结果如下:
\begin{align} p𝑣p∗ &= 𝐿(p)𝑅(p^*)v &&\\ \\ &= \begin{bmatrix} a & -b & -c & -d \\ b & a & -d & c \\ c & d & a & -b \\ d & -c & b & a \end{bmatrix} \begin{bmatrix} a & b & c & d \\ -b & a & -d & c \\ -c & d & a & -b \\ -d & -c & b & a \end{bmatrix} v &&\\\nonumber \\ &= \begin{bmatrix} 1 & 0 & 0 & 0 \\ 0 & 2a^2 + 2b^2 - 1 & 2bc -2ad & 2ac + 2bd \\ 0 & 2bc + 2ad & 1 - 2b^2 - 2d^2 & 2cd - 2ad \\ 0 & 2bd - 2ac & 2ab + 2cd & 1 - 2b^2 - 2c^2 \end{bmatrix} \begin{bmatrix} 0 \\ x \\ y \\ z \\ \end{bmatrix} \end{align}/** | |
rotates passed vec by this (assumed unitary) | |
*/ | |
PX_CUDA_CALLABLE PX_FORCE_INLINE const PxVec3 rotate(const PxVec3& v) const | |
{ | |
const float vx = 2.0f * v.x; // 2x | |
const float vy = 2.0f * v.y; // 2y | |
const float vz = 2.0f * v.z; // 2z | |
const float w2 = w * w - 0.5f; // a^2 - 0.5 | |
const float dot2 = (x * vx + y * vy + z * vz); // 2bx + 2cy + 2dz | |
return PxVec3((vx * w2 + (y * vz - z * vy) * w + x * dot2), // 2x(a^2 - 0.5) + (2cz - 2dy)a + b(2bx + 2cy + 2dz) | |
(vy * w2 + (z * vx - x * vz) * w + y * dot2), // 2y(a^2 - 0.5) + (2dx - 2bz)a + c(2bx + 2cy + 2dz) | |
(vz * w2 + (x * vy - y * vx) * w + z * dot2)); // 2z(a^2 - 0.5) + (2by - 2cx)a + d(2bx + 2cy + 2dz) | |
} | |
/** | |
inverse rotates passed vec by this (assumed unitary) | |
*/ | |
PX_CUDA_CALLABLE PX_FORCE_INLINE const PxVec3 rotateInv(const PxVec3& v) const | |
{ | |
const float vx = 2.0f * v.x; | |
const float vy = 2.0f * v.y; | |
const float vz = 2.0f * v.z; | |
const float w2 = w * w - 0.5f; | |
const float dot2 = (x * vx + y * vy + z * vz); | |
return PxVec3((vx * w2 - (y * vz - z * vy) * w + x * dot2), | |
(vy * w2 - (z * vx - x * vz) * w + y * dot2), | |
(vz * w2 - (x * vy - y * vx) * w + z * dot2)); | |
} |
另外矩阵逆旋转 rotateInv ,表示旋转操作的反向,实际上可以视作旋转矩阵的虚部取反,即: 再带入旋转矩阵公式的结果;如果你对此足够有兴趣,不妨自己试试,应该和上面给出的实现相吻合。
# 四元素的叉乘
三维向量叉乘的意义在于,计算垂直于两个三维向量组成的平面的三维向量,一般用于已知两个互相垂直的坐标轴,求另一个坐标轴,来建立坐标系。
但对于四维空间这个计算实际上没有任何意义。即使需要构建四维坐标系,也需要已知三个互相垂直的四维向量,求另一个。因此,两个四元数的叉乘未被定义。
# PxTransform 接口说明
部分对子成员接口的封装这里就不再赘述,主要介绍几个比较重要的接口:
# Transform——vec3
坐标的旋转和平移实际上是两个变换,在 transform 接口中,两者有一个明确的优先级:先旋转再平移。
这里也比较好理解,如果把平移视作坐标加减,旋转视作坐标乘除。
一般情况下更倾向于先做乘除再做加减,这样能更好的调整位置。如果先做加减再做乘除,那么加减的值就不得不考虑乘除带来的影响。
PX_CUDA_CALLABLE PX_FORCE_INLINE PxVec3 transform(const PxVec3& input) const | |
{ | |
PX_ASSERT(isFinite()); | |
return q.rotate(input) + p; | |
} |
# Transform——Transform
两个 transform 的叠加也是一个比较有意思的问题:这里以 src 作为基变换,在此基础上叠加自身的平移和旋转变换
旋转:上面讲到,关于旋转的叠加,实际上就是两个四元数的乘积,因此非常简单。
平移:对于平移,由于会受到旋转的影响,因此这里的平移叠加还考虑了基变换的旋转,用公式解释的话类似下面这种:
//! Transform transform to parent (returns compound transform: first src, then *this) | |
PX_CUDA_CALLABLE PX_FORCE_INLINE PxTransform transform(const PxTransform& src) const | |
{ | |
PX_ASSERT(src.isSane()); | |
PX_ASSERT(isSane()); | |
// src = [srct, srcr] -> [r*srct + t, r*srcr] | |
return PxTransform(q.rotate(src.p) + p, q * src.q); | |
} |
# Transform——Plane
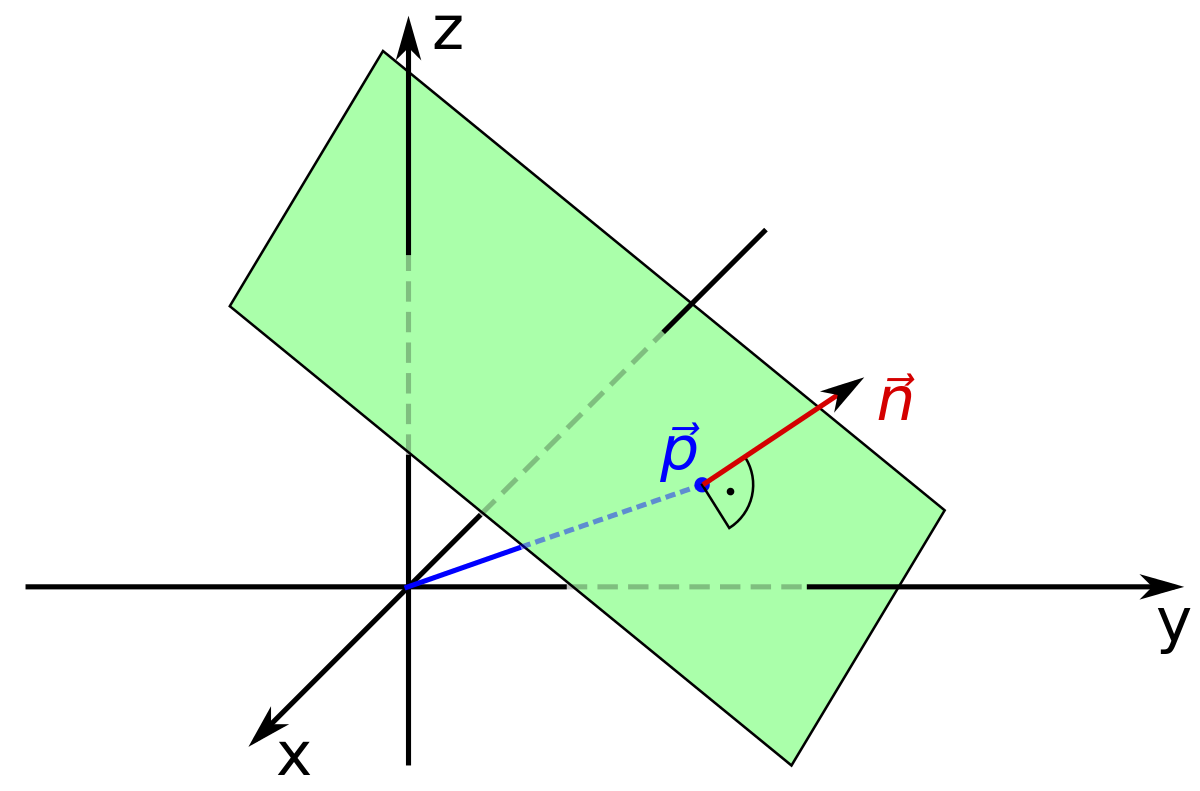
这个也很有意思,PxPlane 在几何上的本意是平面,之所以放在 PxTransform 里面,是因为 PxPlane 本身的表示方式比较特殊。
PxPlane 通过一个垂直于平面的法向量 n 和一个距离原点的距离 d 来表示,实际上就是一个过原点的垂直于平面长度为 d 的方向向量:
下面来看看 PxPlane 的 Transform 做了些什么:
- n:法向量不受平移影响,旋转操作直接和四元数 q 做乘法。
- d:平面到原点距离,不受旋转影响,但 Transform 的平移操作还需要结合平移方向 v 和旋转后的法向量 n 做投影来计算
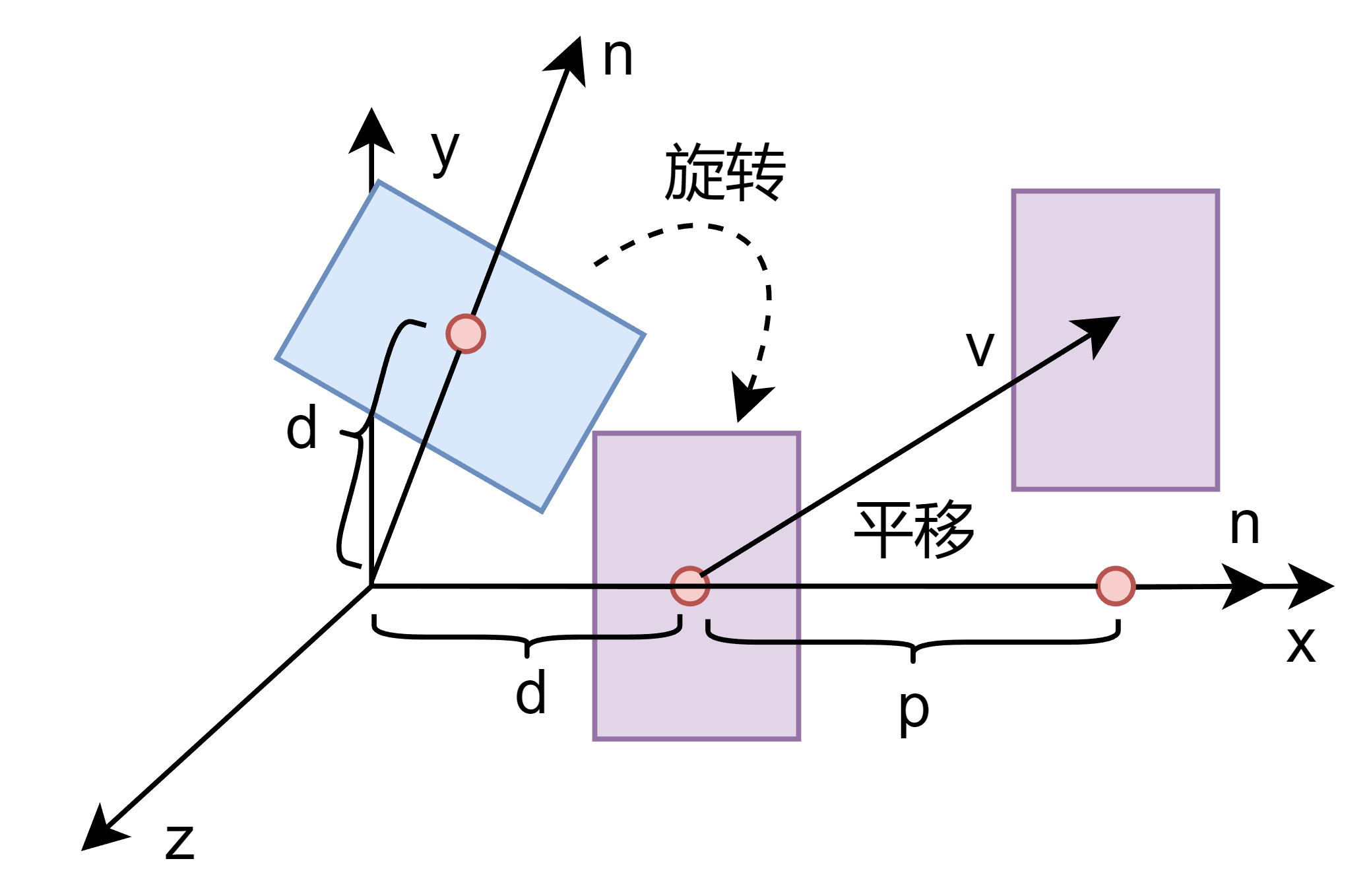
这里的结果来看,实际计算的距离是反的,因此可以推断法向量方向是从平面点指向原点。
PX_CUDA_CALLABLE PX_FORCE_INLINE PxPlane transform(const PxPlane& plane) const | |
{ | |
PxVec3 transformedNormal = rotate(plane.n); | |
return PxPlane(transformedNormal, plane.d - p.dot(transformedNormal)); | |
} | |
PX_CUDA_CALLABLE PX_FORCE_INLINE PxPlane inverseTransform(const PxPlane& plane) const | |
{ | |
PxVec3 transformedNormal = rotateInv(plane.n); | |
return PxPlane(transformedNormal, plane.d + p.dot(plane.n)); | |
} |
# 参考链接
- Quaternion